|
|
Next Previous Table of content
8. Advancement and implementation of Toda's model
In the last years, the
interest in Toda's theoretical approach has risen again. This can be seen,
among other things, by the frequency with which he is quoted approvingly, for
example by authors such as Frijda, Pfeifer, or Doerner. The increased reception
of Toda conincides with a renewed interest in the construction of real
autonomous agents. In this respect there have been several approaches
to modify Toda's model on the basis of recent findings from emotion
psychology and implement it partly in a computer simulation or a robot.
The works of Aubé, Wehrle, Pfeifer,
Dörner, and others are presented briefly in this chapter. 8.1.
The modification of Toda's urges by Aubé
Michel Aubé pointed out
the problems inherent in Toda's system of urges (Aubé, 1998). On the one
hand he criticizes Toda's classification of urges : Thus grief for
example is classified as one of the rule observance urges. On the
other hand he points out that Toda classifies a number of urges as
emotions which one would call rather a need (e.g. hunger). Finally he
notes that some urges represent what Frijda calls action tendencies and not the emotions themselves,
for example rescue or demonstration . Aubé therefore suggests
first of all to give up the definition of urges as emotions but to
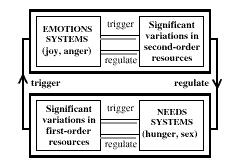
understand them rather as motives. Aubé differentiates these motives in two
classes: Needs such as hunger or thirst represent a motivational control
structure, which make resources of the first order available and their management possible. Emotions
such as annoyance or pride are motivational control structures, which create,
promote or protect resources of second order. Such control structures of
second order are, for Aubé, social obligations ( commitments ).
Fig. 6: Two control layers for the
management of resources (Aubé, 1998, p. 3) Commitments are for Aubé the central factor
with emotions:
Within autonomous
agents, commitments represent dynamic units, active subsystems
which look out after significant events which are of importance for
their fulfilment or injury. They register as variables, for example,
who is obligated to whom, until when and about what).
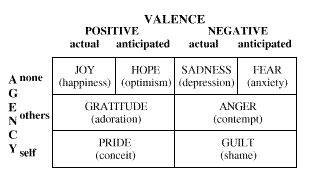
Aubé has developed
a general call matrix for fundamental classes of emotions combining
the approaches of Weiner and Roseman. He arranges Toda's social urges
in this matrix.
Fig. 7: Call structure for fundamental
emotions (Aubé, 1998, p.4)
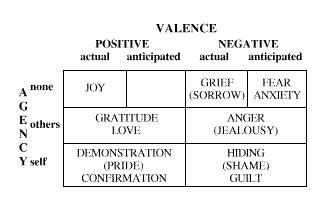
Fig. 8: Allocation of Todas urges to
the call structure for fundamental emotions (Aubé, 1998, p. 5) Aubé comes to the
conclusion that his modified version of Toda's urges agrees with the
most important theories of motivation and with his theory of emotions-as-commitment-operators.
Such a control structure is for him a substantial condition, in order to
design cooperative adaptive agents which can move independently in a complex
social environment. 8.2.
The partial implementation of Toda's theory by Wehrle
Wehrle converted the basic
elements of Toda's social Fungus Eater into a concrete computer model
(Wehrle, 1994). As a framework for this he used the Autonomous Agent
Modeling Environment (AAME). The AAME was developed specifically
to investigate psychological and cognitive theories of agents in concrete
environments. To AAME belongs an object-oriented simulation language
with which complex micro worlds and autonomous systems can be modelled.
Moreover, a number of interactive simulation instruments belong to the
system with which the inspection and manipulation of all objects of
the system are possible during execution. For the concrete implementation
of social Fungus Eaters some additional assumptions were necessary which
cannot be found in this way in Toda's work: They keep a certain distance
to each other, in order to avoid conflicts around food finds or ineffective
ore collecting. On the other hand they keep in loose contact, in order
to be able to help one another in an emergency. In place of pre-programmed
urges Wehrle's model uses a cybernetic control loop in which the
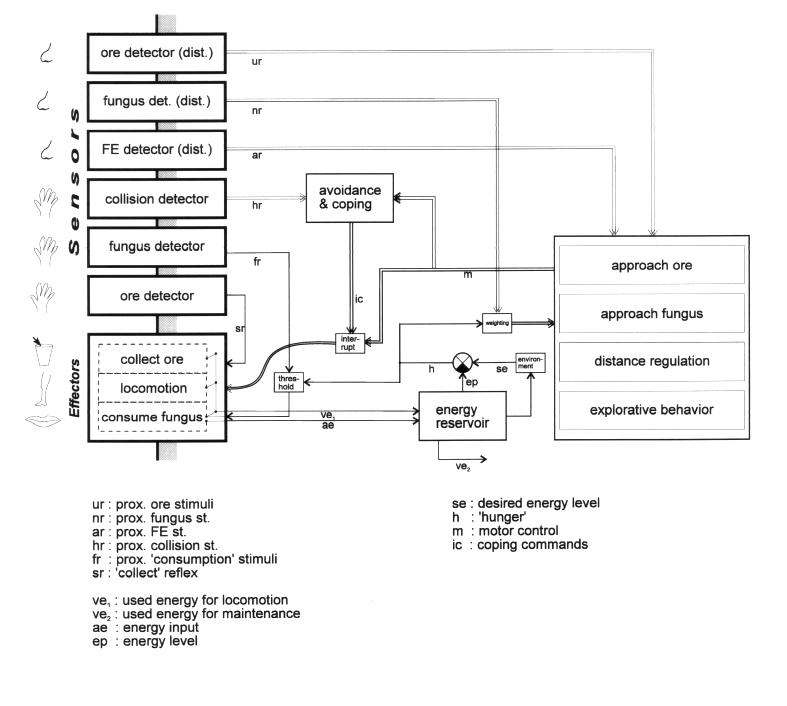
energy balance of an agent is linked with hedonistic elements. The complete model of the
social Fungus Eaters looks as follows:
Fig. 9: Model of a social Fungus Eater
(Wehrle, 1994) The emergent behaviour of
the agents in his model is described by Wehrle as follows:
Surely this implementation
is only a small first step to actually develop an autonomous system
based on Toda's principles. It shows however that it is in principle
possible and that already in a very restrictive implementation first
emergent effects show themselves. 8.3.
Pfeifer's "Fungus Eater principle"
Pfeifer has described the
construction of autonomous agents after the Fungus Eater principle, based on
Toda's model. (Pfeifer, 1994, 1996). His starting point was the
only partial success of his model FEELER as well as other attempts of the
"classical" AI to develop computer models for emotions. He
formulates his criticism in six points:
Pfeifer's Fungus Eater
principle assumes that intelligence and emotions are characteristics of
"complete autonomous systems". Therefore he concerns himself with
the development of such systems. This way, one can also avoid to lead a
fruitless debate about emotions and their function:
The Fungus Eater
principle means at the same time that one must observe an accordingly
designed agent over a longer period of time in order to see which behaviour develops
under which conditions. Building on these
remarks, Pfeifer developed two models of an autonomous Fungus Eater: a Learning Fungus Eater with a physical
implementation as well as a Self-sufficient Fungus Eater as a pure
software simulation. The Learning Fungus
Eater is a small robot, equipped with three kinds of sensors: proximity sensors determine the
distance to an obstacle (high activation with proximity, low with
distance); collision detectors
are activated with collisions; target sensors can detect a goal,
if they are within a certain radius around this goal. The robot has two wheels which are
propelled independently by two motors.
The Learning Fungus
Eater has two reflexes: collision-reverse-turn
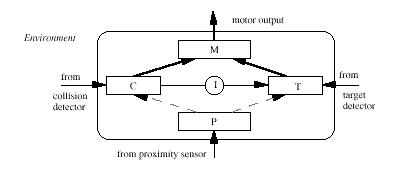
and if-target-detected-turn-towards-center-of-target. The control architecture consists of a
neural net which can be changed partially by Hebbian learning:
Fig. 10: Control architecture of a Learning
Fungus Eater (Pfeifer, 1994, p. 10) The entire control system
consists of four layers: the collision
layer, the proximity layer, the target layer, and the engine
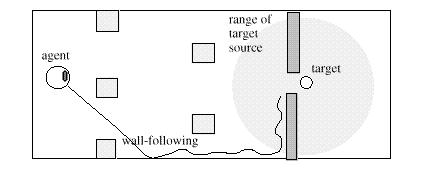
layer. The only task of the robot
is to move around. Its environment
looks as follows:
Fig. 11: Environment of the Learning
Fungus Eater (Pfeifer, 1994, p.10) What happens now if the
robot is activated? First it will hit
obstacles. Each reverse-and-turn
activity makes possible Hebbian learning between the proximity layer
and the collision layer, until the robot has learned to evade obstacles. It looks from the outside as if the robot can
anticipate obstacles. Pfeifer points
out that usually for such an "anticipating" behaviour an
architecture with several layers is suggested, while one layer is actually
sufficient. Pfeifer explains two
further phenomena of the robot:
This demonstrates clearly,
according to Pfeifer, that a system without strategies, without anticipation
mechanism, without knowledge over sources of food can show a behaviour which
is classified by observers as purposeful and motivated - but which results,
however, only from the interaction of the system with its environment. The Learning Fungus
Eater is in as much no complete autonomous system as it cannot support
itself. This is why Pfeifer
developed the Self-sufficient Fungus Eater, at first only as
a software simulation. The agent is in this
case is situated in a "Toda landscape" with fungi as food
and ore for exploitation. The action selection here is clearly more
complicated: the agent can explore
(look for ore or food), it can eat or collect ore.
What it does is determined by the central variables "energy
level" and "collected ore quantity". For the action selection in each given situation the agent has
only one rule: "If the
agent is exploring and energy level is higher than amount of ore collected
per unit time, it should ignore fungus (but should not ignore ore),
if not it should ignore ore (but should not ignore fungus)." (Pfeifer,
1994, p. 12) Here also, according to
Pfeifer, the result for observers is a state to which they attribute a high
emotional intensity
Pfeifer cautions
in the same essay that these few findings can naturally not explain what
emotions really are. However, he
expects a lot from the further pursuit of this approach, even if it is very
time intensive; more, in any case, than from computer models which deal with an
isolated emotion model. 8.4.
The approach of Dörner et al.
Dörner has developed a
computer model that integrates cognitive, motivational, and emotional
processes (Dörner et al., 1997; Dörner and Schaub, 1998; Schaub, 1995, 1996):
the PSI model of intention regulation. Within the framework of PSI he
developed the model "EmoRegul" which is concerned particularly with
emotional processes. PSI is part of a theoretical
approach which Dörner calls "synthetic psychology". This approach tries to analyze, by designing
psychological processes, how these processes can be represented as processes
of information processing. Dörner's
starting point is similarly to Toda's if he writes, "..that in
psychology one may not divide unpunished the different psychological
processes into their components "(Dörner and Schaub, 1998,
p.1). Core of
the PSI model is the concept of "intention". Schaub defines intention as an internal
psychological process, "...
defined as an ephemere structure consisting of an indicator for a state of
lack (hunger, thirst etc..) and
processes for the removal or avoidance of this state (either ways to the consummational
final action or ways to avoidance, in the broadest sense "escape")." (Schaub,
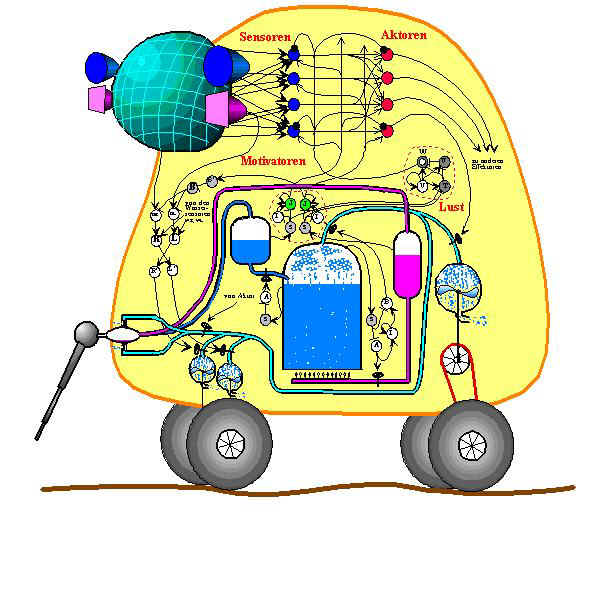
1995, p. 1) The PSI
agents are conceived as steam engines which move in a simulated environment
with watering holes, gasoline stations, quarries etc.. In order to be able to move, the agents need both gasoline and
water which are to be found in different places, however.
Fig. 12: Schematic structure of the PSI system
(Dörner and Schaub, 1998, p. 7) A PSI agent has a set of
needs which are divided in two classes:
material needs and informational needs. Among the material needs are the
intake of fuel and water as well as the avoidance of dangerous situations
(e.g. falling rocks). Among the
informational needs are certainty (an expectation fulfilled) and uncertainty
(an expectation unfulfilled), competence (fulfilment of needs) and affiliation (need after social
contacts). State of lack can
be likened in PSI to a container whose content has fallen below a certain
threshold value. The difference between actual and desired state Dörner
calls desire. "A need signals thus that a desire of
a certain extent is present."
(Dörner and Schaub, 1998, p. 10) Such a state of lack activates
a motivator whose activation degree is the higher, the larger the deviation
from the desired value and the longer it already persists. The motivator now tries to take over the
action control in order to eliminate this condition by a consummational final
action. For this purpose a goal is
aimed at which is known to the motivator from past experiences. With goals, motives also
develop in PSI, which represent instances which initiate an action,
direct it to a certain goal, and maintain it until the goal is achieved. Since several motivators
always compete with one another for the action control, the system has
a motive selector which decides, with the help of a fast expectation
x value calculation, which motivator possesses the largest motive strength
and thus is to receive the advantage. The value of a motivator is determined by
its importance (size of the deviation from the desired value) and urgency
(available time until the removal of the actual condition); expectation is determined by the ability
of the agent to actually satisfy this need (probability of success). PSI has also a memory
which consists of sensory and motor "schemata". Sensory schemata represent the knowledge of the agent about
its environment; motor schemata are
behaviour programs. There is no
distinction between different kinds of memory in PSI. The action control
in PSI takes place through intentions which are defined operationally
as combination of the selected motive with the informations which are
linked with the active motivator in the memory network.
These informations concern the desired goals, the operators or
action schemata to be applied, the knowledge about past, futile approaches
to problem solving as well as the plans which PSI produces with the
help of heuristic procedures. All
these informations consist of neural nets;
an intention as a bundling of all these informations makes up
the working memory of PSI. The central mechanisms of
emotion regulation in PSI are the motivators for certainty and competence,
thus two informational needs. Active
certainty or competence motivators elicit certain actions or increase the readiness for it: "A dropping certainty leads to an increase of the extent of "background control ". This means that PSI turns more frequently than usual away from its actual intention turns to control the environment. Because with small predictability of the environment one should be prepared for everything (...) Furthermore, with dropping certainty the tendency to escape behaviours or to behaviours of specific exploration rises (...) Not so extreme cases of escape are called information denial; one does simply not regard the areas of reality anymore which have proved themselves as unpredictable. Part of this "retreat" from reality is that PSI becomes more hesitant in its behaviour with dropping certainty, does not turn to actions so fast, plans longer than it would under other circumstances, and is not as "courageous" when exploring." (Dörner and Schaub, 1998, p. 33) Emotions thus
develop with PSI not in their own emotion module, but as a consequence of rule
processes of a homoeostatic system.
Schaub expresses it in such a way:
"What we call with humans emotions, are the different ways
of action organization, connected with associated motivations." (Schaub, 1995, p. 6) Dörner
grants that a variety of emotions is not yet representable in PSI because the
system is missing a module for introspection and self reflection. However, this is, according to Dörner, only
a matter of the refined implementation of the model and thus no problem in
principle. Dörner's
model exhibits a set of similarities with other models. Like Toda and Pfeifer, his starting point
is to design a completely autonomous system without a separate emotion
module. As with Frijda and Moffat,
PSI contains a central memory which is accessible to all modules for
reading and modification at any time:
"The
use of common memory structures permits all processes to receive information
particularly over the intentions waiting for processing. Each subprocess thus knows, e.g., importance
and urgency of the current intention." (Schaub,
1995, p. 6) PSI works
not with explicit rules, but is a partially connectivist system which
produces emotions by self organization. 8.5. Summary
and evaluation
The modeling approaches
of Pfeifer and Wehrle clearly show which importance Toda's theory possesses
for the construction of autonomous agents who could not survive without
the control function of emotions. In
place of pre-defined emotion taxonomies "wired" into the model,
both authors decides on the opposite approaches:
Their models contain only the most necessary instructions for
the agent. While Wehrle still
links certain events with hedonistic components, Pfeifer does completely
away with them. In the end,
both systems show a behaviour which can be interpreted as "emotional"
by an observer. Both models have the
disadvantage that they say not all too much about emotions in computer
agents - for this, a longer observation period is necessary in which
the agents can develop. Thus
the problem is avoided to program emotions arbitrarily into a system; on the other hand, a new discussion is opened over whether a behaviour
which appears to an observer as emotional is also actually emotional.
Here the argument turns again into a philosophical one.
Both approaches follow the
assumption of emotions as emergent phenomena consequently to the end
- with all pro and cons which result from it. Aubé's attempt
to link Toda's urges with his theoretical emotion model holds
its own problems. He correctly
recognizes a set of inconsistencies in Toda's urges model and
tries to eliminate these. He
places, however, his own definition of emotions as social phenomena
into the foreground. Aubé's fusion of Weiner's and Roseman's theories,
which he combines then with his and Toda's approach into one, raises
fundamental problems whose discussion would be too far-leading here. The model
of Dörner, finally, is similar in many respects to the approaches of Pfeifer
and Wehrle (and thus Toda): Emotions
are understood as control functions in an autonomous system. Dörner links this approach with a
homoeostatic adjustment model. Also Dörner
does not define emotions explicitly;
emotional behaviour develops due to the change of two parameters which
he calls "certainty" and "competence". In this case, too, emotional behaviour is
attributed to the system only from the outside. Dörner, too, regards emotions as emergent phenomena which do
not have to be integrated into a system as as a separate module. It remains to be seen in which direction PSI
(and thus Dörner's emotion model) develops if the system receives an
introspection module. Next Previous Table of content
|
|